
[Master講堂]「Master探索 開啟智慧之窗」系列講座:詹魁元教授演講紀實
2025年5月20日圖書館特別邀請了機械工程學系,且曾任副教務長及創新設計學院副執行長的詹魁元教授來擔任Master講座講者,詹教授以「別人的最佳路線不見得是你的」為題,深入淺出地分享了進行路線規劃實作,再考量個體細微差異與其運行模式多樣性後,都將重新定義最佳路線的結果。若將此講題應用在人生求學或生涯規劃時,也頗富深厚意涵,值得深思體會。
本學期圖書館Master講堂「MASTER探索.開啟智慧之窗」系列講座,就在詹教授這場兼具工程研究實作經驗且富人生哲理意涵的演講中,畫下了完美的句點。接著,就讓我們以文字紀錄,再次回味當日演講的精彩內容吧!

詹魁元教授與圖書館學科服務組林鳳儀組長合影
首先,詹教授以自身帶愛犬爬茶壺山的突發經驗,點出了路線規劃上的變數,以及當下如何因應突發狀況,最後成功抵達終點。接著說明了今日講題大綱,包括:最佳路線如何規劃、現行規畫路線的方式遭遇哪些問題、如何避開會動或形狀很怪的障礙物、如何規劃多載具同時在路線上行進,以及路線規劃的發展方向,讓聽者從演講開始就可以預期今日的滿滿收獲。
 詹魁元教授介紹當日演講主題大綱
詹魁元教授介紹當日演講主題大綱
•各種路線規劃問題
接著,詹教授說明在進行最佳路線規劃時,其實就是一種計算過程,如何從起點到目的地,透過權重分數加總計算,找出抵達目的地的最佳路線。其後,詹教授介紹了幾種在進行路線規劃時常運用的演算法,包括最具核心基礎的Dijkstra演算法、A*演算法(透過給予引導的搜尋方法)以及RRT隨機法(此法更適用於真實機器人的採樣搜尋),並說明如何透過路徑平滑化,讓規劃更貼近真實路線規劃與應用。
•路線規劃時還需要考量什麼
路線規劃時,常常以為找到一條最短、最快、最節能、最安全、也最舒適的路線,實則不然。有時最短、最快的路線不見得是最佳路線,還有很多種不同需求層面的考量,速度不是唯一的考慮因素。另外也需要考量路線上可能出現的變數或障礙物,以及個體本身的差異性,例如小型車輛適合通行的最佳路線,就不見得適合大型卡車。除了車型、車種外,不同動力、車速、以及到達目的地時停車的不同角度、不能逆向停車等方向位置因素,都必須納入路線規劃中。
•計畫趕不上變化—如何迴避未知障礙
因應最佳路線上可能會出現的變數或障礙物,因此進行路線規劃時,也需探討出現未知障礙物時的避讓策略。詹老師接著就以研究室裡進行的實作,介紹了多項與學生共同合作的障礙物避開策略研究,包括:避開靜態障礙物的方法,即DWA、避開動態障礙物的方法:改善DWA、速度障礙法(VO)、結合VO與MPC;另外也需要預測動態障礙如人類可能的駕車行為、分析動態環境中的風險,以及分析不同風險接受度的駕駛行為,並從中建立可換邊推動的移動策略、多模式運動規劃、以及多模式連續移動路徑規劃等。
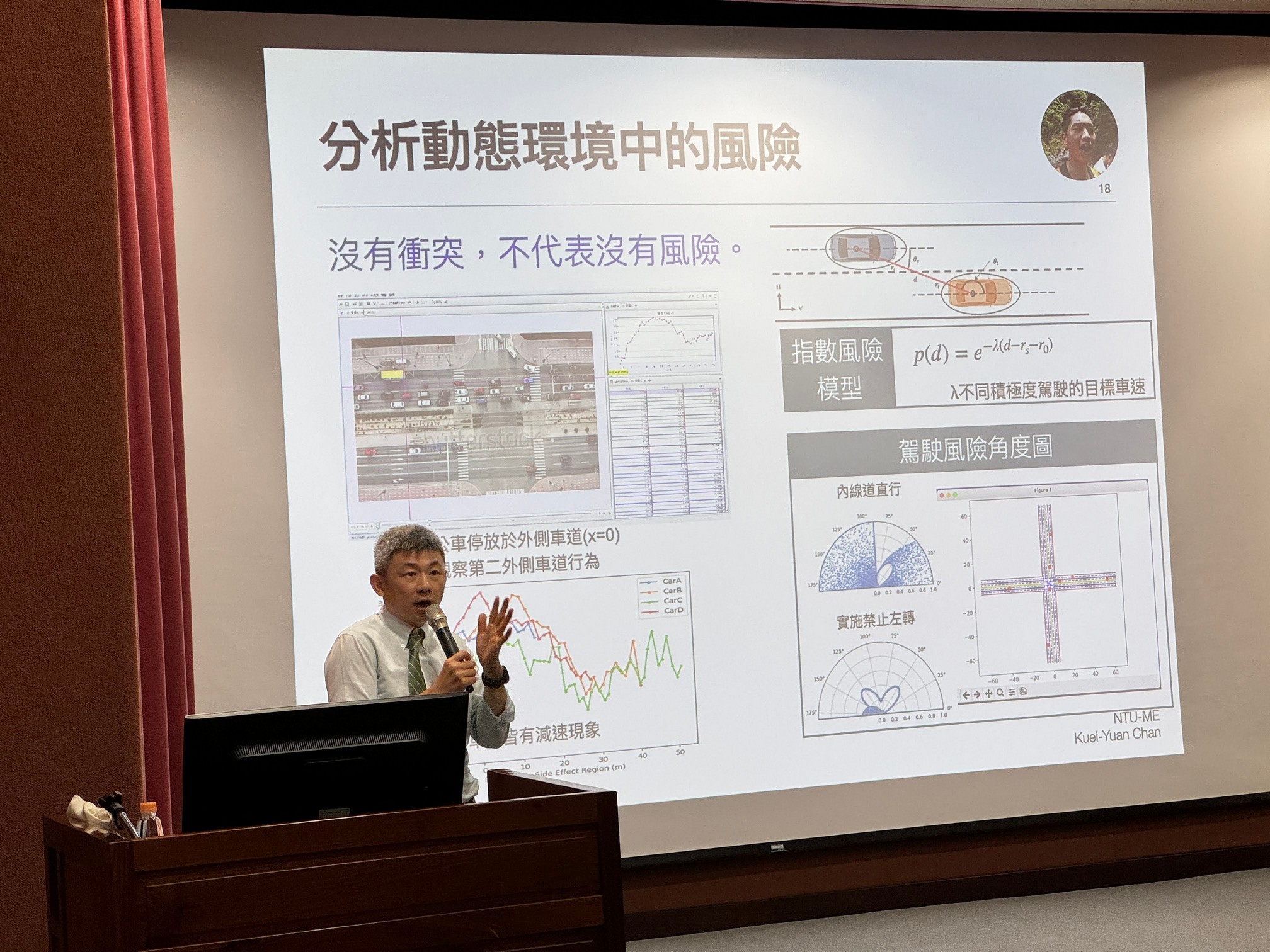 詹魁元教授說明在路線規劃時,如何分析動態環境中的風險
詹魁元教授說明在路線規劃時,如何分析動態環境中的風險
•多載具同步規劃策略
目前詹教授和同學們的合作研究中,也正在進行多載具同時行進的動態避障實驗。當車輛遇到動態避障方法無法解決時,就改為進行全域規劃,特別找出避障空間(如避車彎),讓多台載具能同時進行自己的路線,但在遇到障礙時,能夠轉為進行全域規劃的全新路線。
•路線規劃現存挑戰
詹教授指出路線規劃現存挑戰,包括:多感測融合與誤差估測、邊緣運算效能最佳化、即時資訊回饋與演算法更新、考慮動力學之高速行駛規劃、混流場域模型建立、人類行為辨識、以及分析與統計軟體等。
 詹魁元教授指出路線規劃時,重視差異性也能應用於人生規劃
詹魁元教授指出路線規劃時,重視差異性也能應用於人生規劃
最後,詹教授指出不管是機器人、電動車的行進路線,或是我們自己在決定我們的人生方向時,儘管別人給的最佳路線,如果自己沒有親自走一回,撞過一回,就無法親自修正,以適應自己本身的差異性。當日演講雖然講的是理性的路線規劃,卻富饒人生哲理,相信每位聽眾都從中收穫滿滿。如果您對電動車路線規劃實作有興趣,也歡迎點選簡報與影片連結,完整觀看當日演講的全紀錄,包括精彩的QA哦!
觀看演講錄影
作者: 李明錦